A pleno día, en el medio de la calle, en pleno centro de Quilpué !!!

XD
 Luego vendra: Explosiones , polvo y quizas lluvia
Luego vendra: Explosiones , polvo y quizas lluvia
 Segundo intento...
Segundo intento...
con fadding, sin rotación, sin alineación , con dispersión de posición y velocidad por cuadrante, con volúmen mula
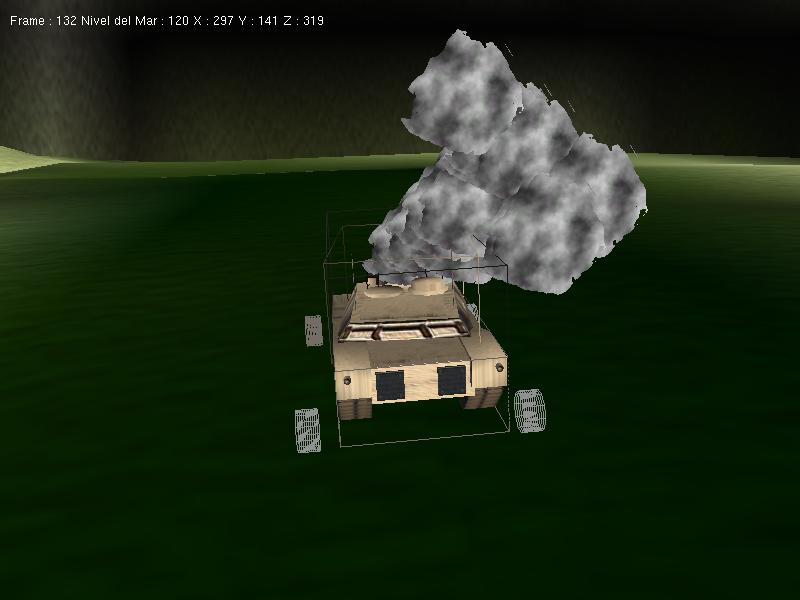
 Tercer intento...
Con faddig, con scaling inicial y progresivo, con rotación, con dispersion y volúmen mula
Tercer intento...
Con faddig, con scaling inicial y progresivo, con rotación, con dispersion y volúmen mula

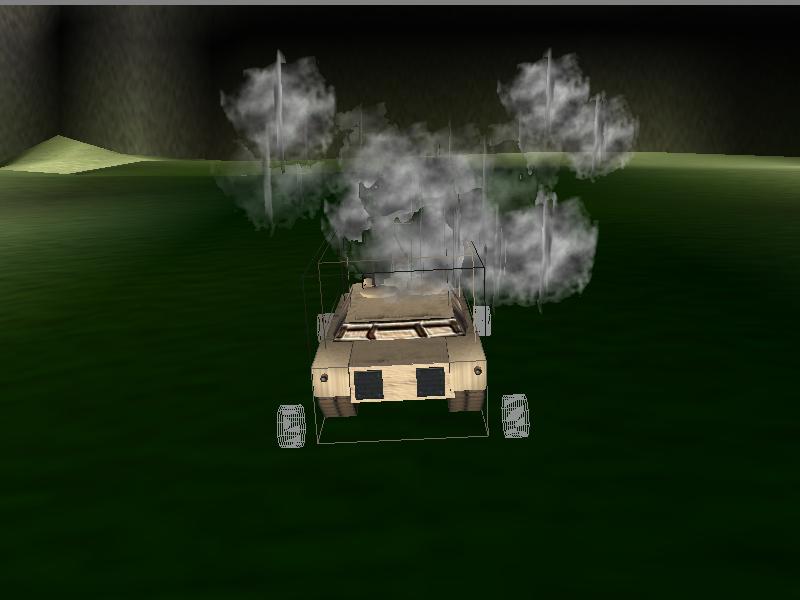
Cuando alínie cada particula con la dirección de visión de la cámara, chao volumen mula... Cámara Alineada!!!
 ahora a arreglar la textura de la partícula...
ahora a arreglar la textura de la partícula...
y encontrar la intrucción mágica : glDisable(GL_DEPTH_TEST);
 ^_^
^_^
mas de lo mismo con otro puf y proyectiles volando

muy wena , na que decir XD
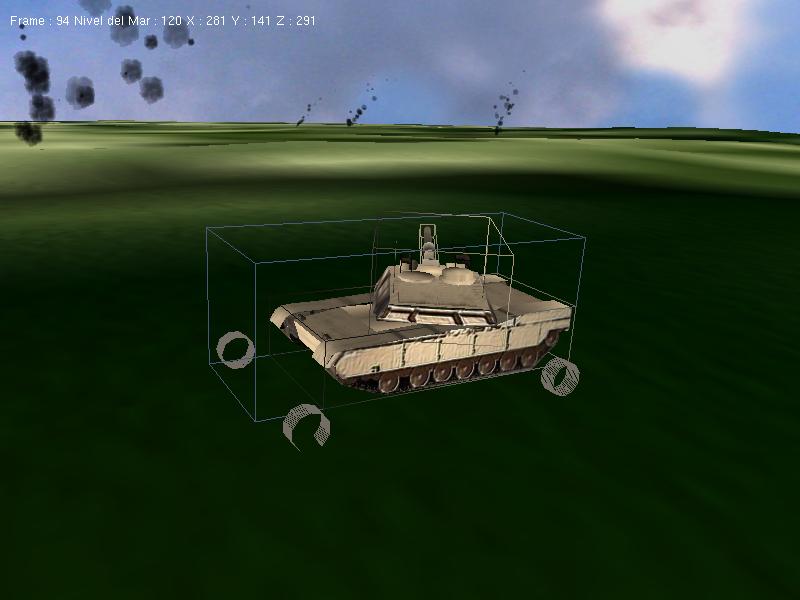
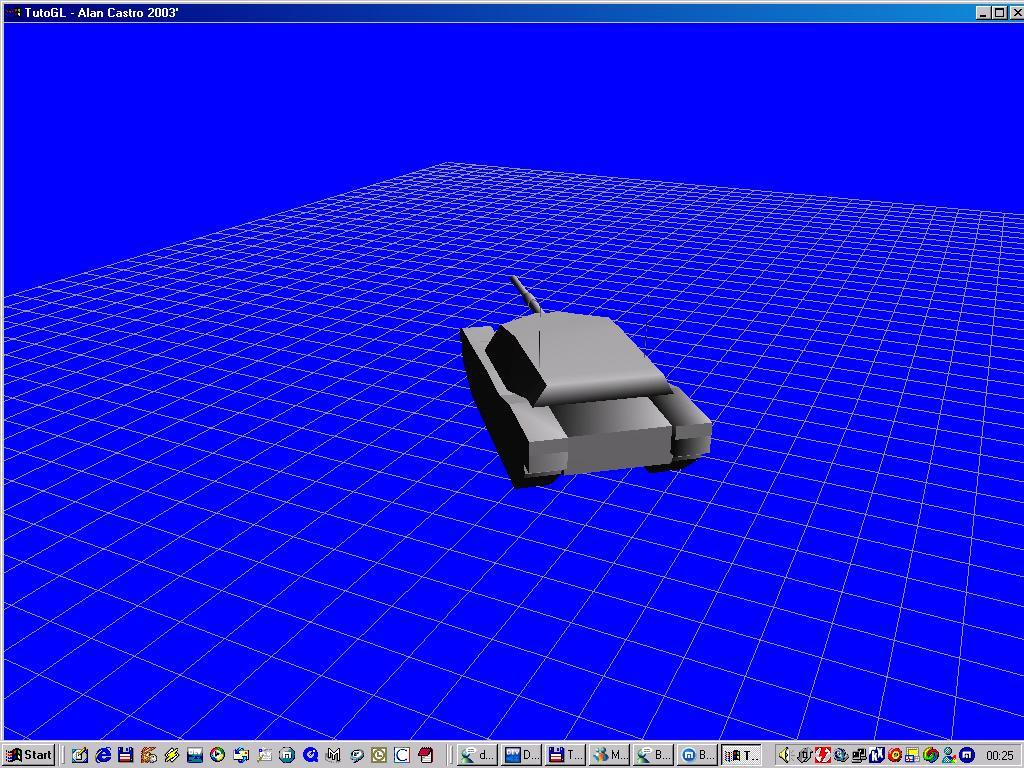
 y luego para probar lo cargué en mi motorcito y se ve así :)
y luego para probar lo cargué en mi motorcito y se ve así :)
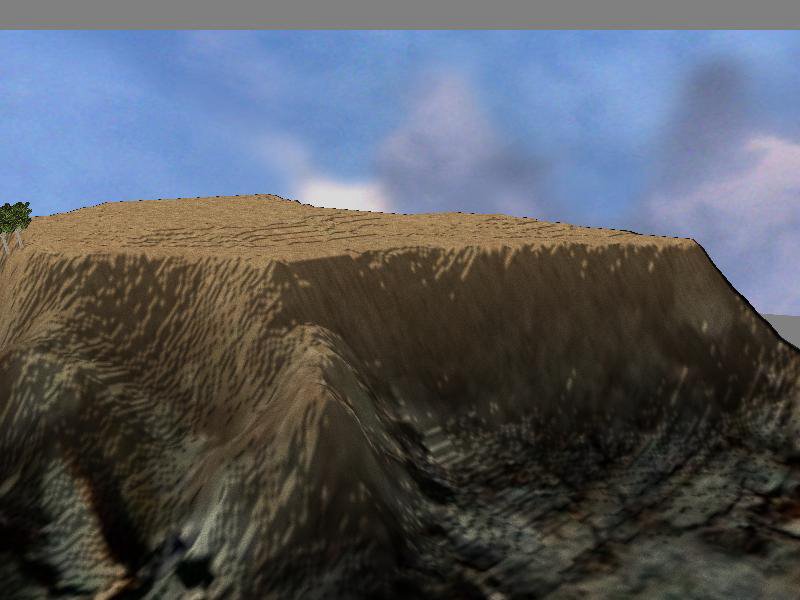 Ahora tengo que ajustar las texturas según la distribucion del terreno: quiero arena abajo y pasto encima. Y...
Ahora tengo que ajustar las texturas según la distribucion del terreno: quiero arena abajo y pasto encima. Y...
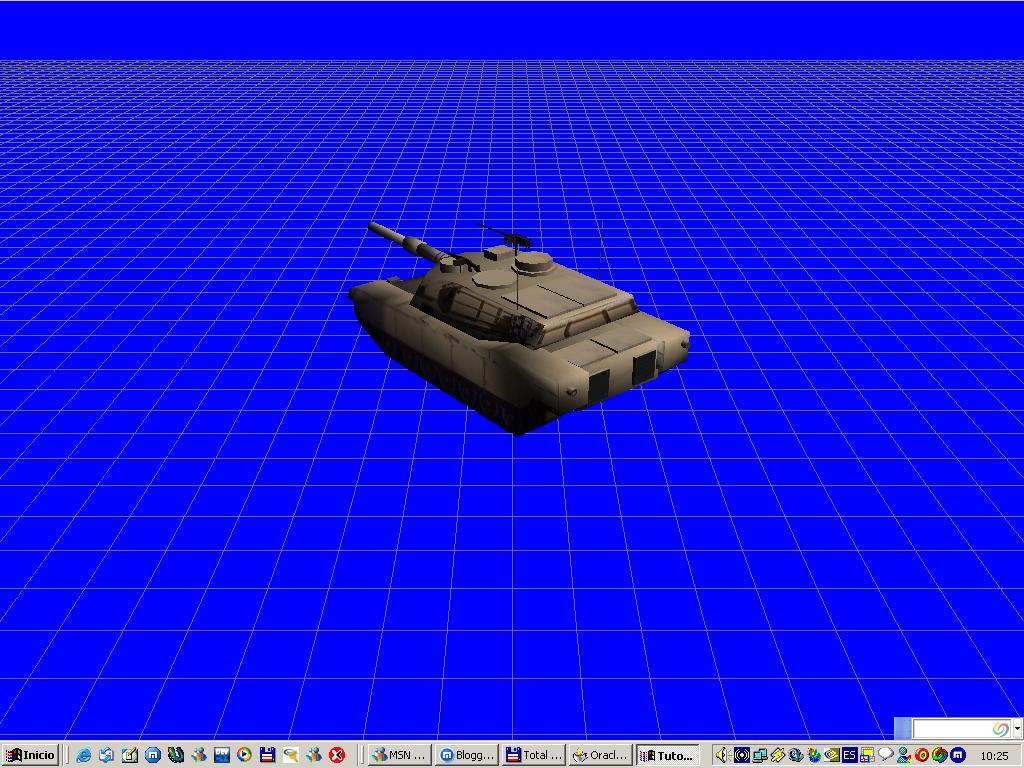
 Upz! resultó! :)
Upz! resultó! :)


Esos puntitos... ¿ Será el aura ? ¿ serán ovnis ? ¿ serán estrellas ? o ¿ sólo es espuma de cerveza en la cámara ?...

XD

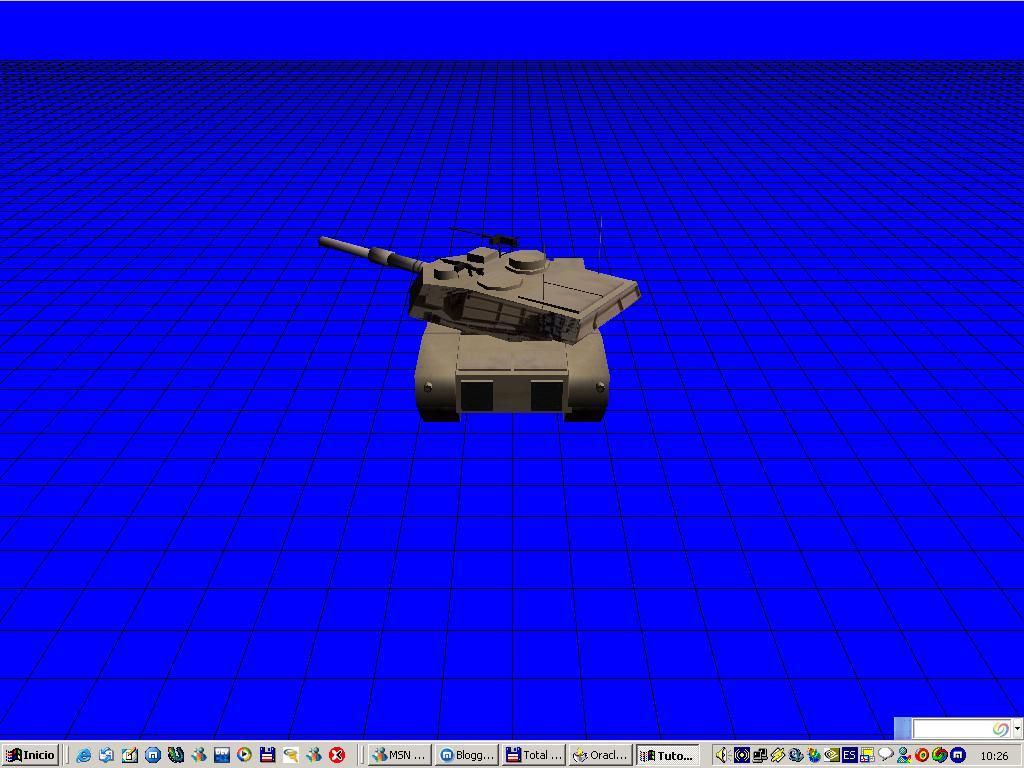
 Luego pensé, ¿ Que pasa si lo hago jerárquico y lo controlo con el mouse ?
Luego pensé, ¿ Que pasa si lo hago jerárquico y lo controlo con el mouse ?
 Luego vino el descubrimiento de la textura con alpha channel...la invención de los árboles y rápidamente del skybox
Luego vino el descubrimiento de la textura con alpha channel...la invención de los árboles y rápidamente del skybox
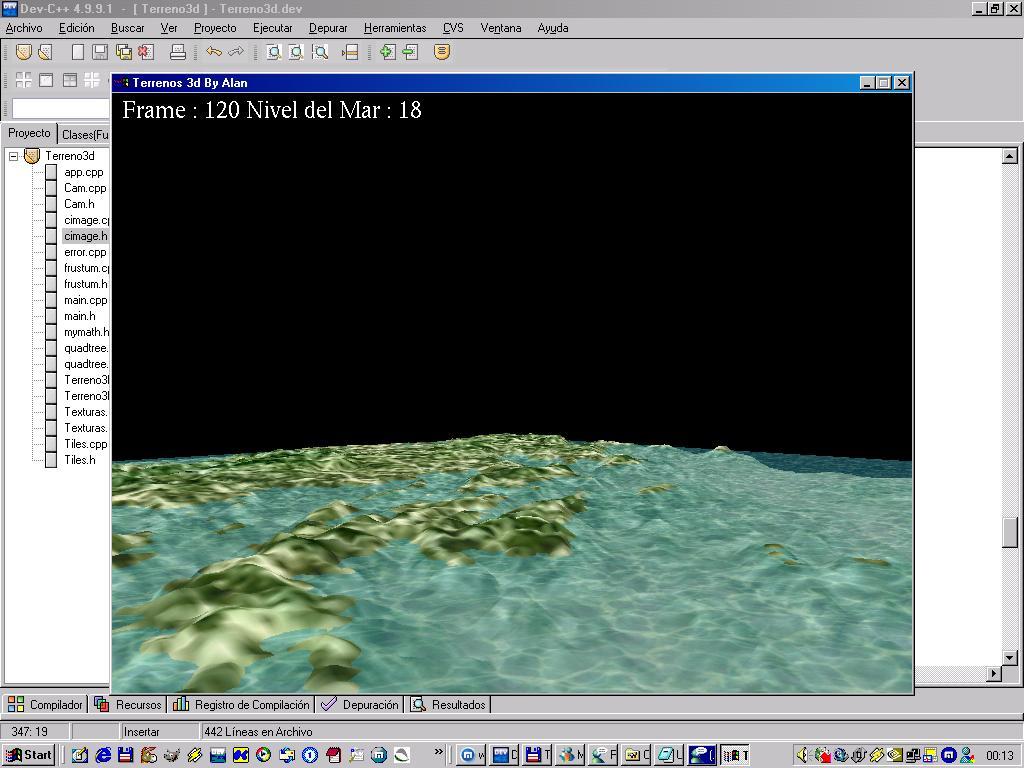
 En un mundo paralelo (otro directorio XD) corría otro engendro conocido como Terreno3d que buscaba afanosamente los secretos del Quadtree , el frustum Culling, Multitexturing y otras leches...
En un mundo paralelo (otro directorio XD) corría otro engendro conocido como Terreno3d que buscaba afanosamente los secretos del Quadtree , el frustum Culling, Multitexturing y otras leches...
Iquique 3D en versión fuerza bruta

Llega el agua...
Por ejemplo esto es lo que pasa cuando haces un frustum culling y no usas la inversa de la matriz de visión
y llegan las sombras....
El descubrimiento de la multitextura y el SkyPlane producen finalmente esto:
Esto fue un tímido intento con Frame Buffer Object para producir reflejos.

y por fin el camino de Tank3D y Terreno3D se cruzan y producen el híbrido deseado.

de alli a seguir el terreno se ha dicho

Después de eso llegaron los shaders, n objetos , mapas en xml, el SkyDome y ahora ODE...



{kind=link}